Online Perception-Aware Path Planning
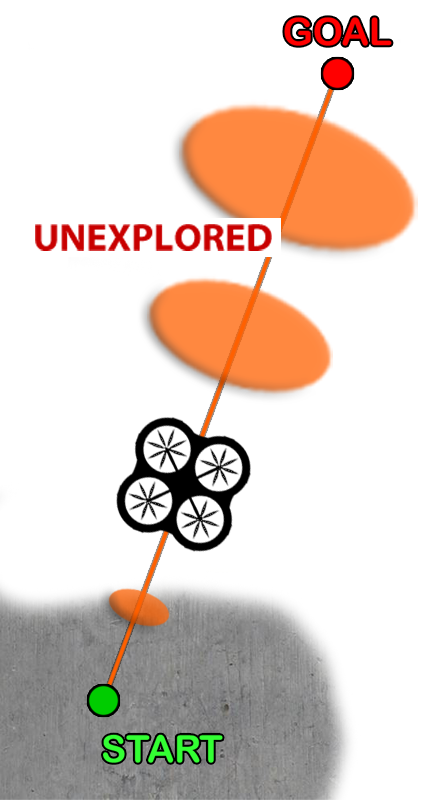
Overview of the method: the robot starts with no prior information about the environment, and attempts to navigate to a goal location.
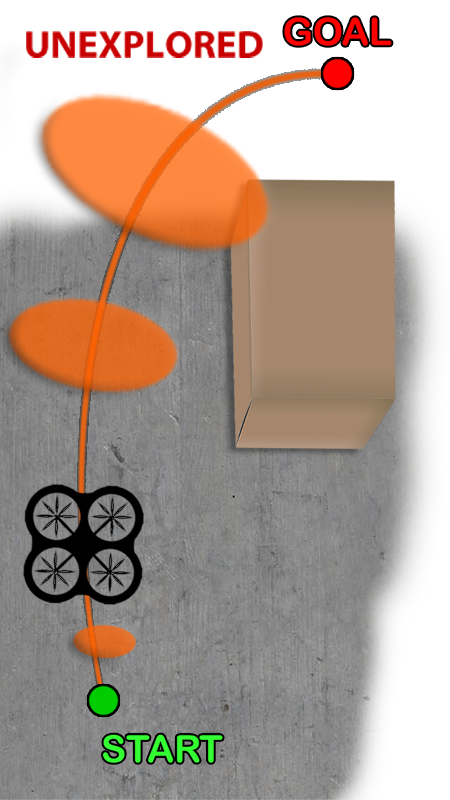
As it builds a map of the environment, it updates the path to avoid newly discovered obstacles.
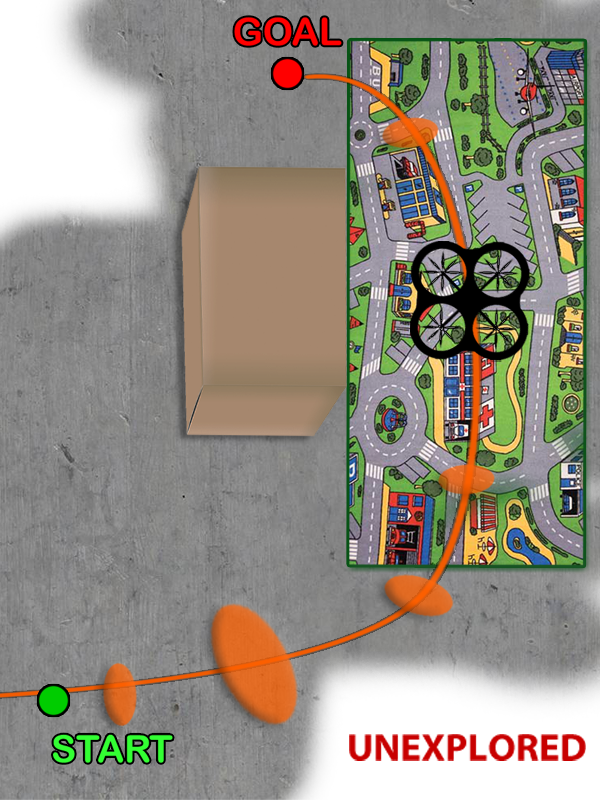
The planner also updates the path when new photometric information is obtained, so that the trajectory will allow the robot to obeserver highly textured areas.
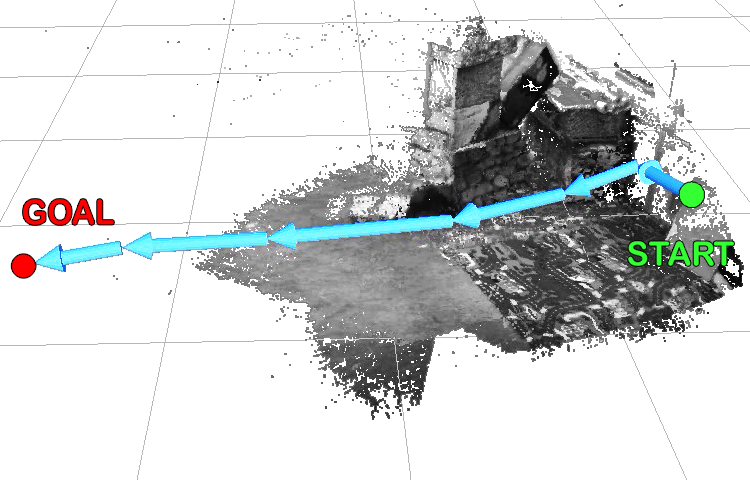
Results from a real-world experiment: the robot begins exploring an unknown environment with no prior map.

As it gathers more geometric and photometric information about the environment, it updates the optimal path to minimize the pose uncertainty by moving through highly textured areas.
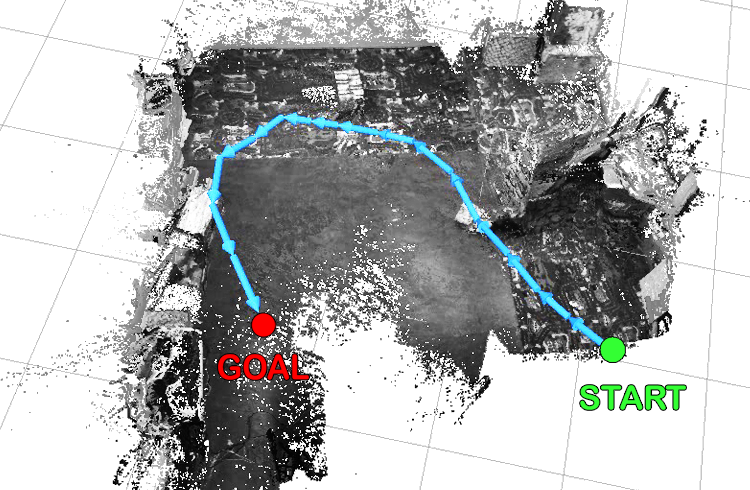
The final path is longer than a direct route, but ensures that the robot will maximize its localization accuracy during the trajectory.

Simulated indoor environment in Gazebo.
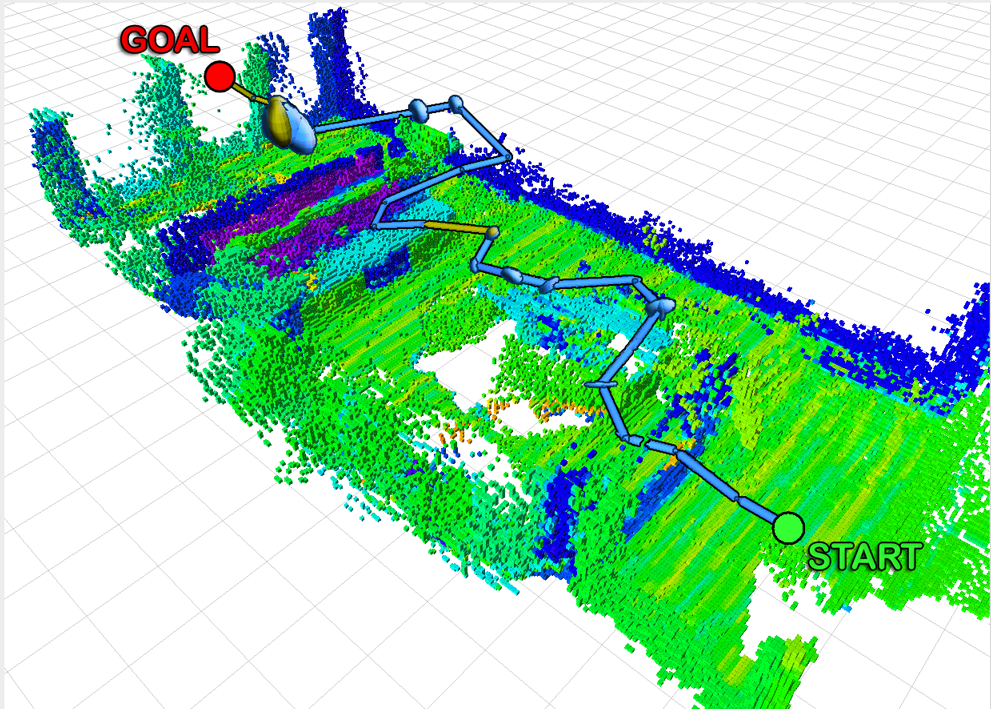
Pose uncertainty (ellipses represent covariance at each waypoint) over the robot trajectory using perception-aware path planning.

Pose uncertainty over the robot trajectory using RRT* planning, which does not consider perception.